BOSM-1601 Opponitur caput Boring Milling Machiner
Usus 1. Equipment
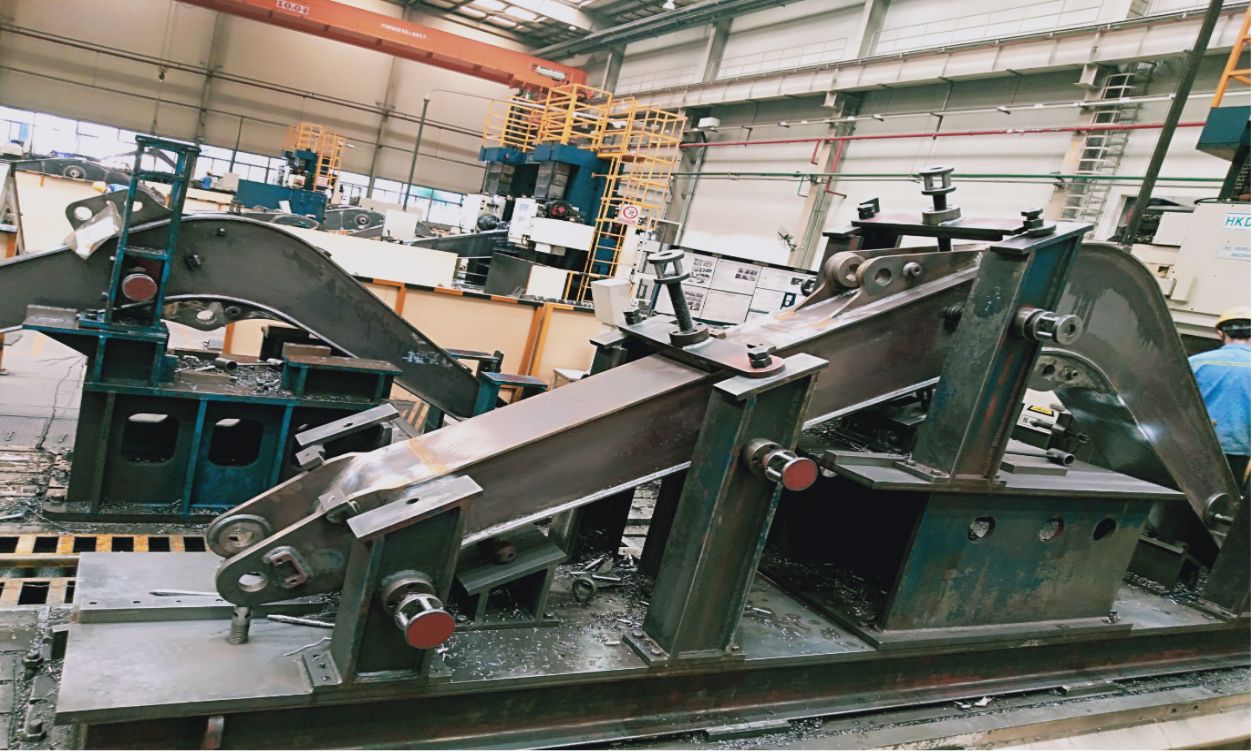
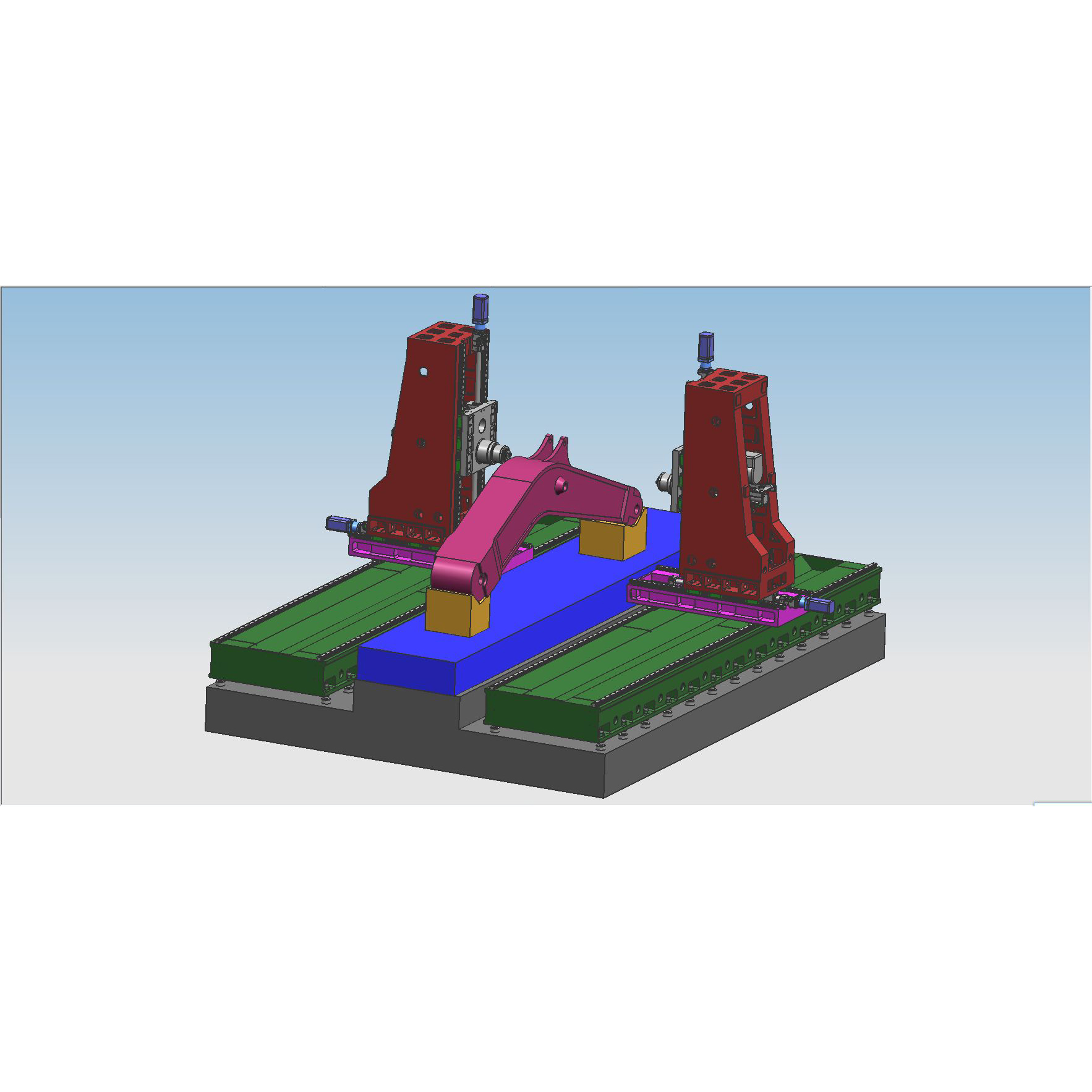
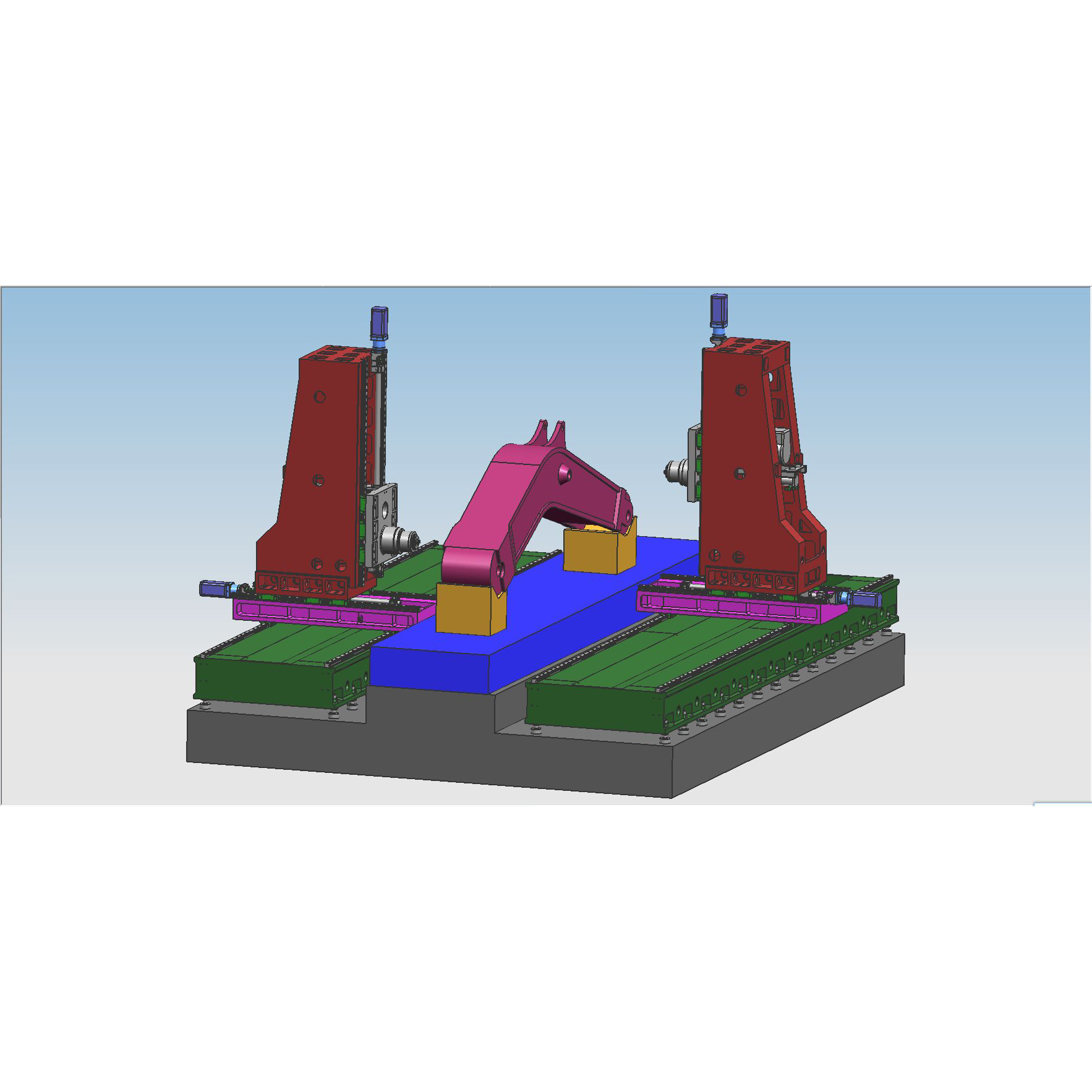
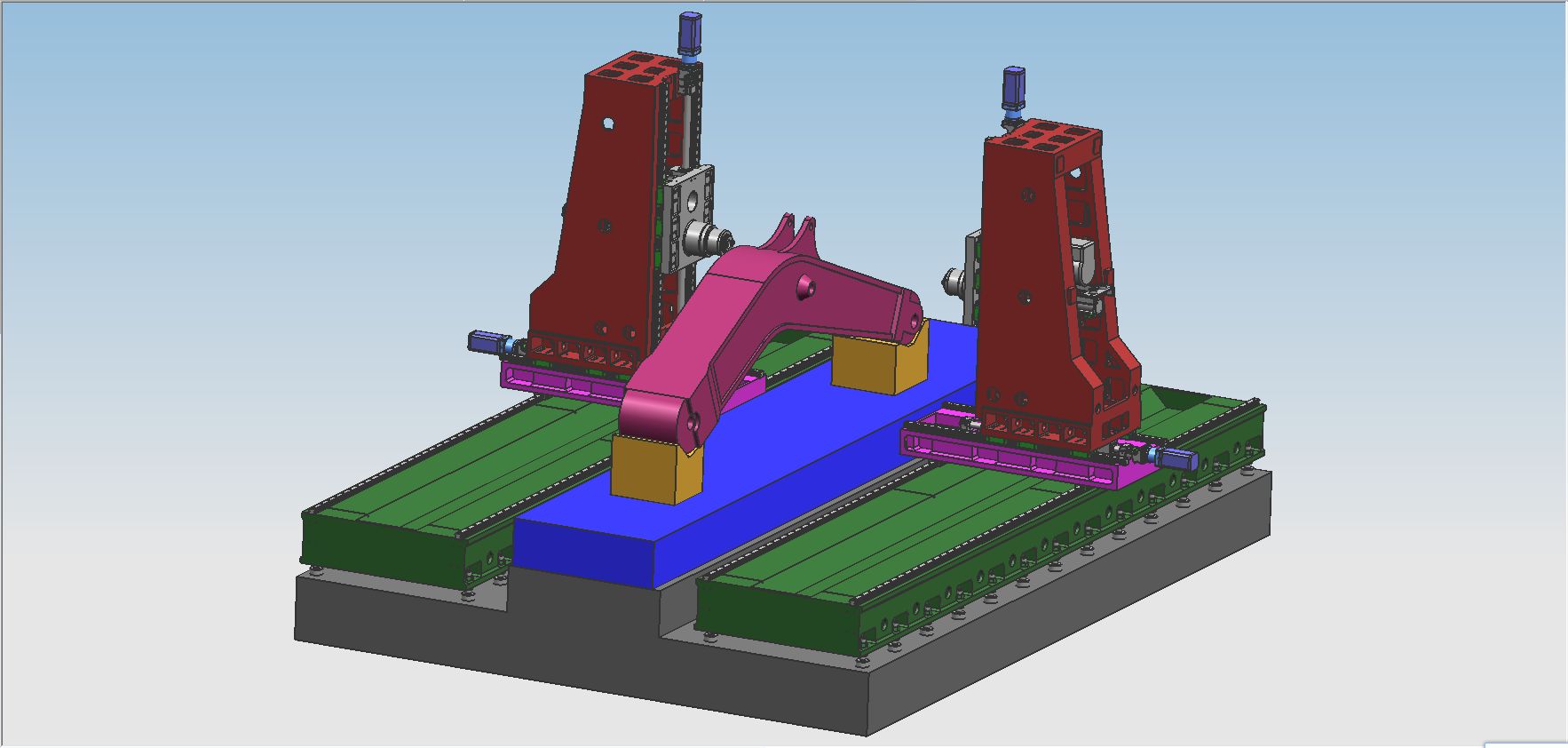
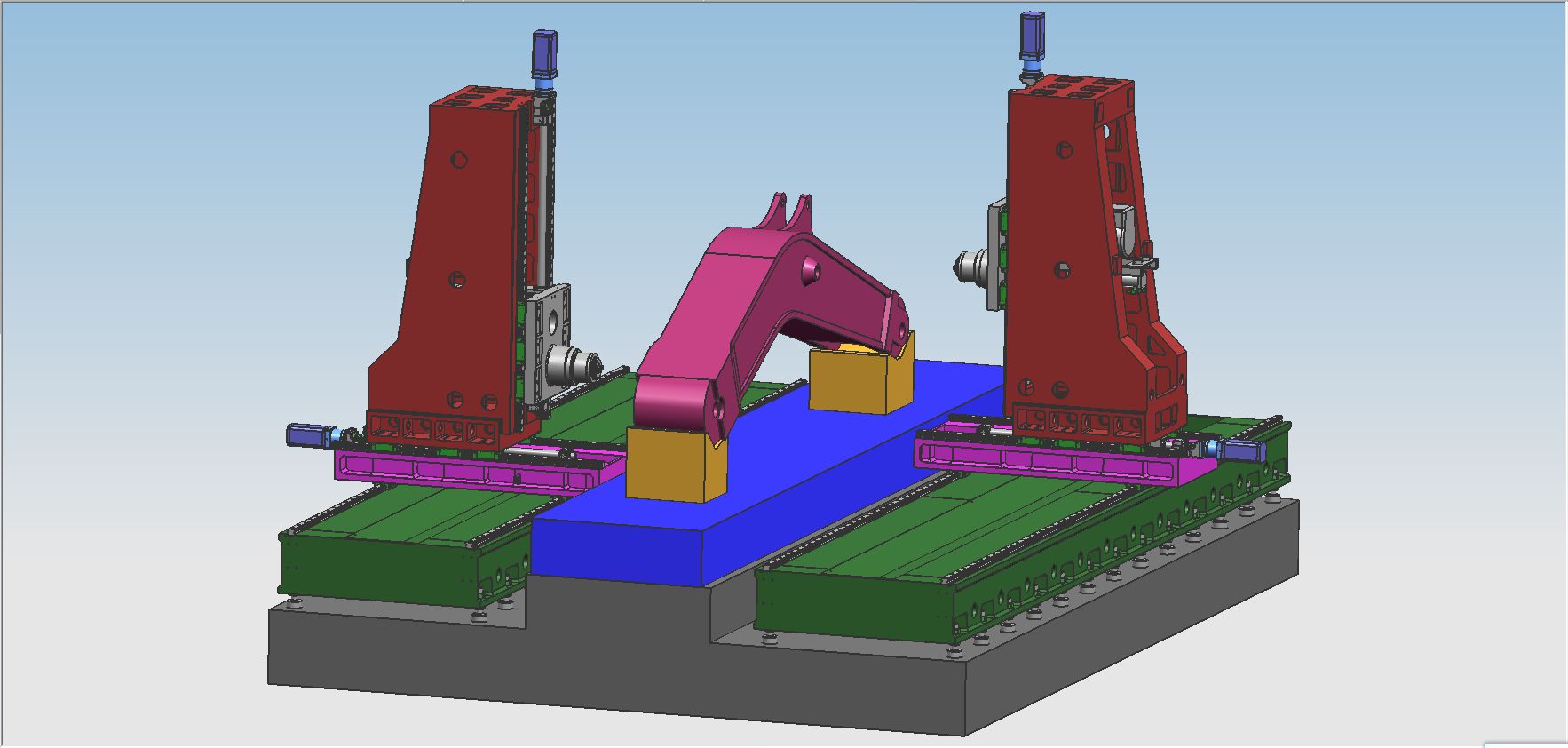
BOSM-1601 duplices stationis numericae potestates columnae mobiles duplices columnae capitis-ad caput taediosum et molendinarium machina peculiaris est machina ad structuras symmetricas machinae constructionis. Machina instructa specialibus columnis mobilibus et binis arietum horizontalium partibus, quae cognoscere potest EXERCITATIO, milling, taediosa et alia processus operis intra ictum efficax perceptivum, workpiece in loco uno tempore discursum esse potest (secundario non opus est. clamping), celeriter onerationis et velocitatis exonerare, celeritas positio celeritatis, altae accurationis processus et efficientiae altae.
2. Main components de Machina
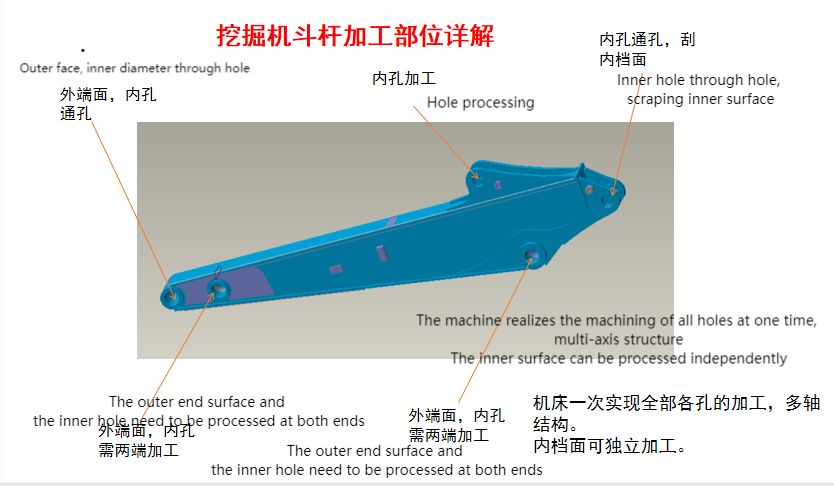
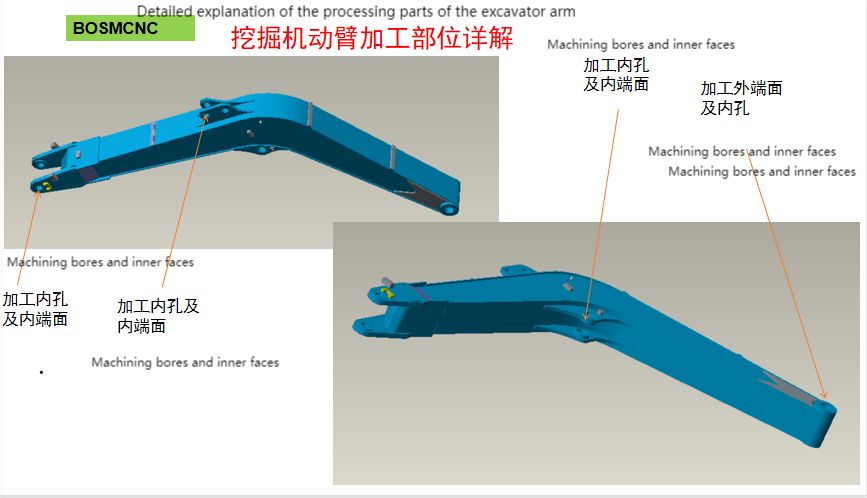
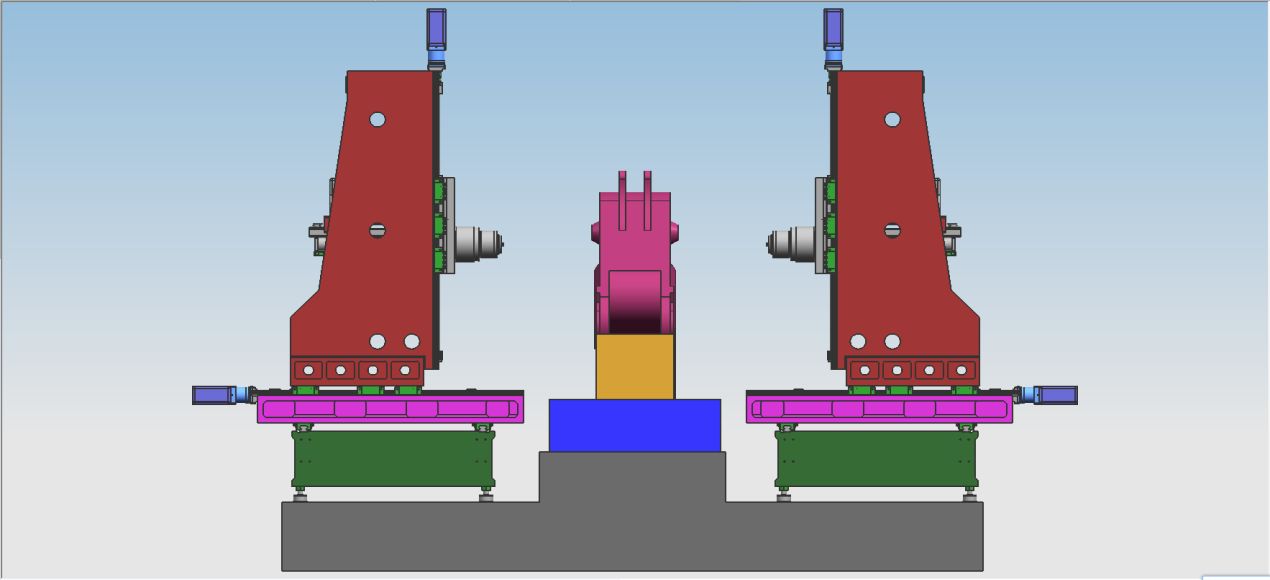
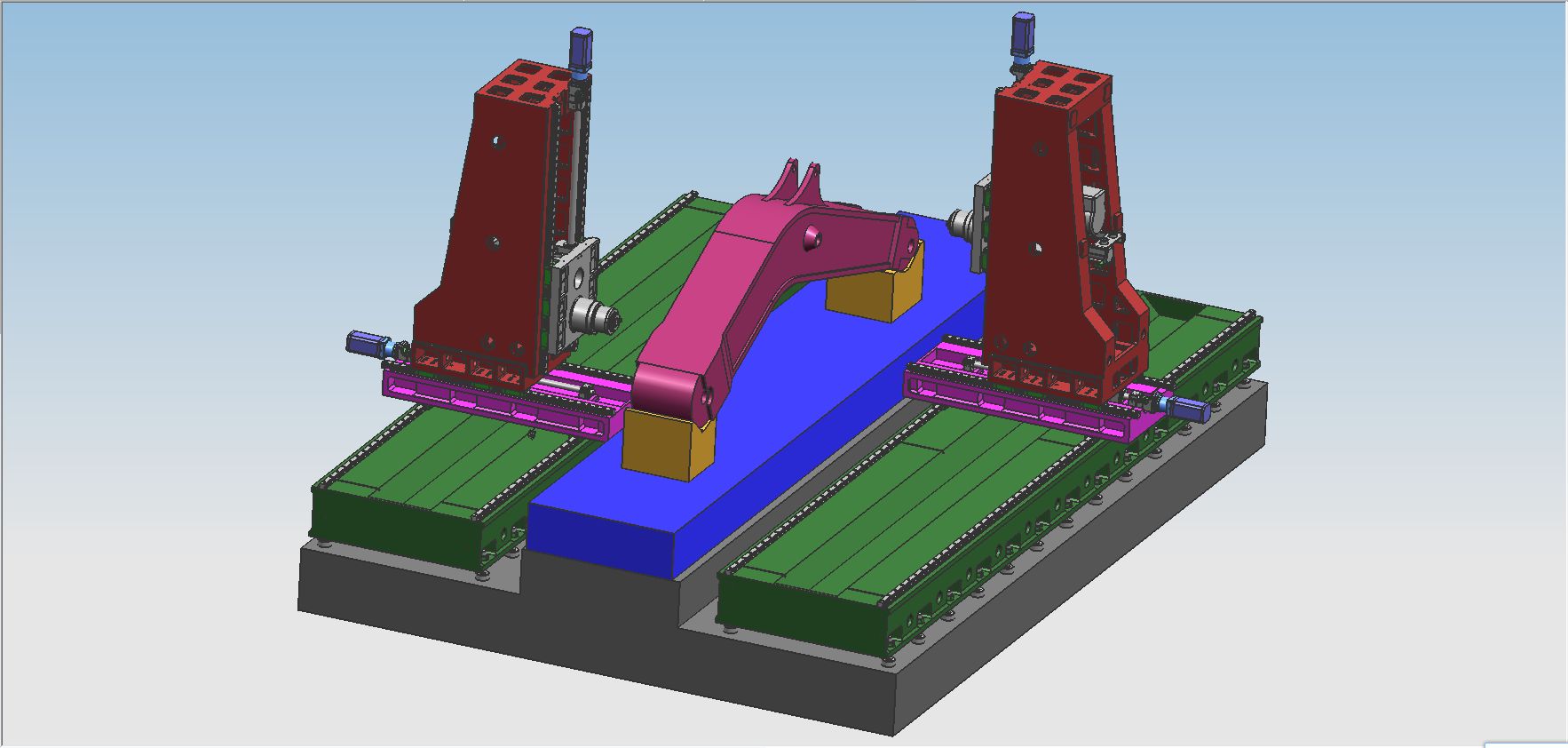
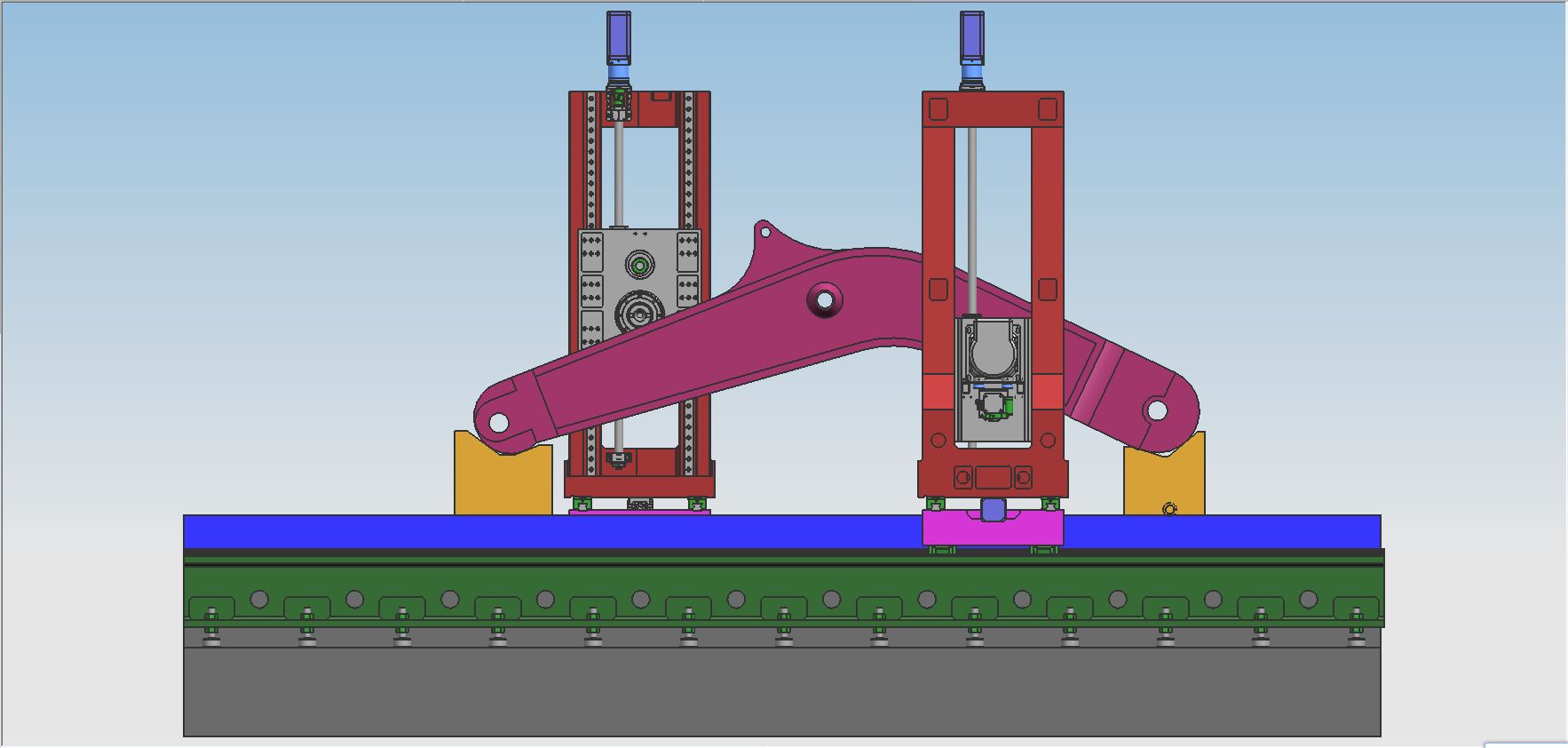
Lecti, opificinae, columnae dextrae sinistrae, radii, sellae, arietes et aliae magnae partes, omnes resinae arenae coronae factae, summus qualis ferrum cinereum 250 iaciens, annata in foveam arenam calidam → fornax candens tremens → tremula canus →. aspera machina → Vibratio senescit → Fornax fervida furnum → Vibratio senescit → Consummatio , Omnino negativam Partum accentus eliminare , Et stabilem observantiam Partum custodire. Machina munera habet ut molendi, taediosum, exercendi, contrariandi, percussendi, etc., et instrumenti refrigerandi methodum externam refrigerandi, Machina continet 6 secures cibarias, quae percipere possunt 4-axem nexum et 6-axem unius actionis. Sunt capita 2 potentia. Directio axialis Machinae et caput potentiae in figura infra monstrantur.
2.1Praecipua structura partium transmissionis axialis pascendi
2.1.1 X1/X2 axis:Columna per ductorem lecti fixi railia longitudinaliter reciprocat.
X-axis transmissio: Actus ac rectus ab AC servo motore, summus praecisio planetarum reducens duas columnas agit, ut linealiter per X-axem per pilam cochleae transmissionis par moveatur.
Rector rail formae: Duo princeps fortitudinis praecisione ductor cancellorum linearium funditus sunt. Subtilitas gradus cochleae pilae in par transmissione est C5.
2.1.2 Y1/Y2 axis:Capita virtutis perforatae et molentis I, II et earum columnae respective in basi firmitatis altae ductoris cancelli utrinque constituuntur, et reciproce per cancellos basi ductor per axes Y1 et Y2 sunt. In AC servo motore adhibetur ad pilam cochleae transmissionis par globum agitare et regere, sellam trahere ad movendum, et per axem Y motus linearem percipere.
Rector rail formae: 4 linearis dux perticis + pila cochlea coegi. Accuratius gradus cochleae pilae in par transmissione C5 est, et imperium semi-clausum ansam adoptatur.
2.1.3 Z1/Z2 axis;Virtutes taediosae et milling capita I, II et earum clitellae illae verticaliter in frontibus columnarum utrinque constituuntur, et reciproce per axes Z1 et Z2 sursum ac deorsum columnae ductor cancelli sunt.
Z1-axis transmissio: AC servo motoria adhibetur ad altam praecisionem redactoris et pilae cochleae transmissionis paris planetariae repellere et regere, et aries per Z-axem linearly impellitur.
Rector rail formae: 2 duce lineari structurae railiatae adoptantur. De gradu cochleae pilae accurate in par transmissione C5.
2.2 Chip remotionem et refrigerationem
Sunt cochleae spirae et planae catenae vectores sub opificino utrinque inaugurati, et astulae automatice adduci possunt ad chip TRADUCTOR in fine per duos gradus spirae et catenae ad humanam productionem cognoscendam. Est sentinam refrigerandi in piscina refrigerantis TRADUCTORS chippis, quae adhiberi potest ad refrigerationem externam instrumenti ad vitam instrumenti perficiendam et serviendam curandam et refrigerandum REDIVIVUS potest.
3. Plena digitalis ratio numerica potestate:
3.1. Cum chip fractionis functionis, chip fractionis tempus et cyclum fractionis chip potest apponi machinae instrumenti hominis.
3.2. Instrumento elevatio functionis instructus, instrumentum distantiae elevatio super machinae instrumenti hominis apponi potest. Cum procul ventum est, instrumentum celeriter levatur, tum astulae proiciuntur, et tum celeriter ad superficiem exercendam transmittuntur et ipso facto ad opus convertuntur.
3.3. Operatio centralised temperamentum archa et manus-tentum unitatis systematis numeralem adiiciunt et instructi sunt cum USB interface et LCD liquido cristallo ostento. Ut facilius programmatio, repono, ostentatio et communicatio, operatio instrumenti habet functiones sicut homo dialogus apparatus, error compensatio et terror automatice.
3.4. Apparatus munus habet previewing et re- inspectione positio foraminis ante processus, et operatio est commodissima.
4. Automatic lubricatio
Apparatus praecisio linearis dux paria rail, subtilitas pilae cochleae paria et alia motus summus praecisio paria systemata latis lubricationis instructa sunt. Automatice lubricatae sentinae outputs olei pressionis et quantitatis lubricatoris oleum cubiculi oleum intrat. Post cubiculum olei oleo repletum est, cum pressio systematis ad 1.4-1.75Mpa oritur, pressionis switch in systematis clauditur, sentinam cessat et valvae exonerare simul exonerare. Cum pressio olei in via guttae infra 0.2Mpa, quantitatis rubricator incipit punctum lubricationis implere et unum oleum implens complet. Ob accuratam olei copiam quantitatis olei injectoris et detectionis pressionis systematis, copia olei certa est, ut in superficie uniuscuiusque par kinematicae cinematographicae sit, reducendo frictiones et indumenta, et damnum ad praecavendum. interna structura per overheating. ut Apparatus accurationem et vitam. Cum duce labens lapso par rail, ductor volvens linearis par rails usus in hac Machina seriem commoda habet:
① Sensus motus summus, attritio coefficientis ferrivi volventis ductoris parva est, tantum 0.0025-0.01, et potentia impulsio valde imminuta est, quae tantum 1 machinae ordinariae aequivalet. /10.
Discrimen inter frictiones dynamicas et staticas valde parvas est, et sequi-usum praestantissimum est, id est, temporis intervallum inter signum incessus et actionem mechanicam perquam brevem, quae ad celeritatem et suavitatem responsionis meliorandam conducit. ratio numeralis moderatio. ③ Apta est ad motus lineares summus velocitas, eiusque celeritas instantanea circiter X temporibus altior est quam cancelli ductoris lapsus. ④ Motus hiatus cognoscere potest et motum rigiditatem systematis mechanici emendare. Ex professionalibus fabricatis, subtilitatem, bonam mobilitatem et facilem sustentationem habet.
5. Apparatus usus environment:
5.1. Environmental necessaria pro apparatu usus
Constantem gradum temperationis ambientis conservare elementum essentiale est ad praecisionem machinationis.
(1) Praesto ambientium temperaturae requisita sunt -10°C ad 35°C, quando temperatus ambiens est 20°C, humiditas 40% ad 75% debet esse.
(2) Ut staticam accurationem Machinae intra certum ambitum servet, requiritur optima temperies ambientium 15°C ad 25°C, et differentia temperatura.
Non excederet ± 2°C/24h.
5.2 Potentia copia voltage: 3-phase, 380V, intra teli ±10% voltage fluctuationis, potentia copia frequentiae: 50HZ.
5.3 Si intentione in regione laborantium instabilis est, Machina cum potentia stabilita instructa debet esse ad normalem Machinae operationem.
5.4 Machina certam fundationem habere debet: filum fundens est filum aeneum, filum diametri non debet esse minus quam 10mm², et fundatio resistentiae parva est in 4 ohms.
5.5 Ad faciendum normalem operationem instrumentorum, si pressus aer fons aeris non potest requisitis fontis caeli, in Machina institui debet.
Addere fontem aeris purgationis fabrica (dehumidificatio, decrescentia, eliquatio) ante aerem.
5.6 Serva apparatum a directo solis, vibrationis et caloris fontibus, summus frequentia generantium, machinarum electricorum conglutinatio, etc., ut ad vitandam machinam productionis defectum vel detrimentum Machinae accurationis.
6. Technical parametri
| Exemplar | 1601 | |
| Processus workpiece magnitudine | Longitudo latitudo altitudo (mm) | 16000×1000×1500 |
| Machina maximum feed | Latitudo (mm) | 1300 |
| Opus desk magnitudine | Longitudo X Latitudo (mm) | 16000*1000 |
| Columna itinerantur | Columna commeo (mm) | 1600 |
| Fusum et deorsum | Sursum et deorsum itinerantur (mm) | 1500 |
| Altitudo a centro ad mensam planum fusum | 100-1600mm | |
| Horizontalis princeps viribus fusum virtus caput unum duo | Quantitas (2) | 2 |
| Fusum cereum | BT50 | |
| Broach | Automatic dissensio, instrumentum manuale mutatio | |
| Diameter Dromonem (mm) | ≤Φ200 | |
| Ictibus diametri (mm) | M3-M30 | |
| Fusum celeritatem (r / min) | 30~3000 | |
| Servo fusum virtutis motoris (kw) | 30*2 | |
|
| Dextra itinerantur distantia duorum finium | 400-1600mm |
| Sinistra et dextra iter duplicium columnarum (mm) | DC quisque | |
| Instrumentum Refrigerationem | Interiorem refrigerationem, exteriorem refrigerationem | |
| Bidirectional Positioning Sagaciter | 300mm | ±0.032 |
| Per-directional repeat positioning accuracy | 300mm | ±0.025 |
| Apparatus Dimensiones | Longitudo latitudo altitudo (mm) | Secundum delineatas (si mutationes in processu designandi sunt, te certiorem faciemus) |
| Crassum pondus (t) | 72T | |