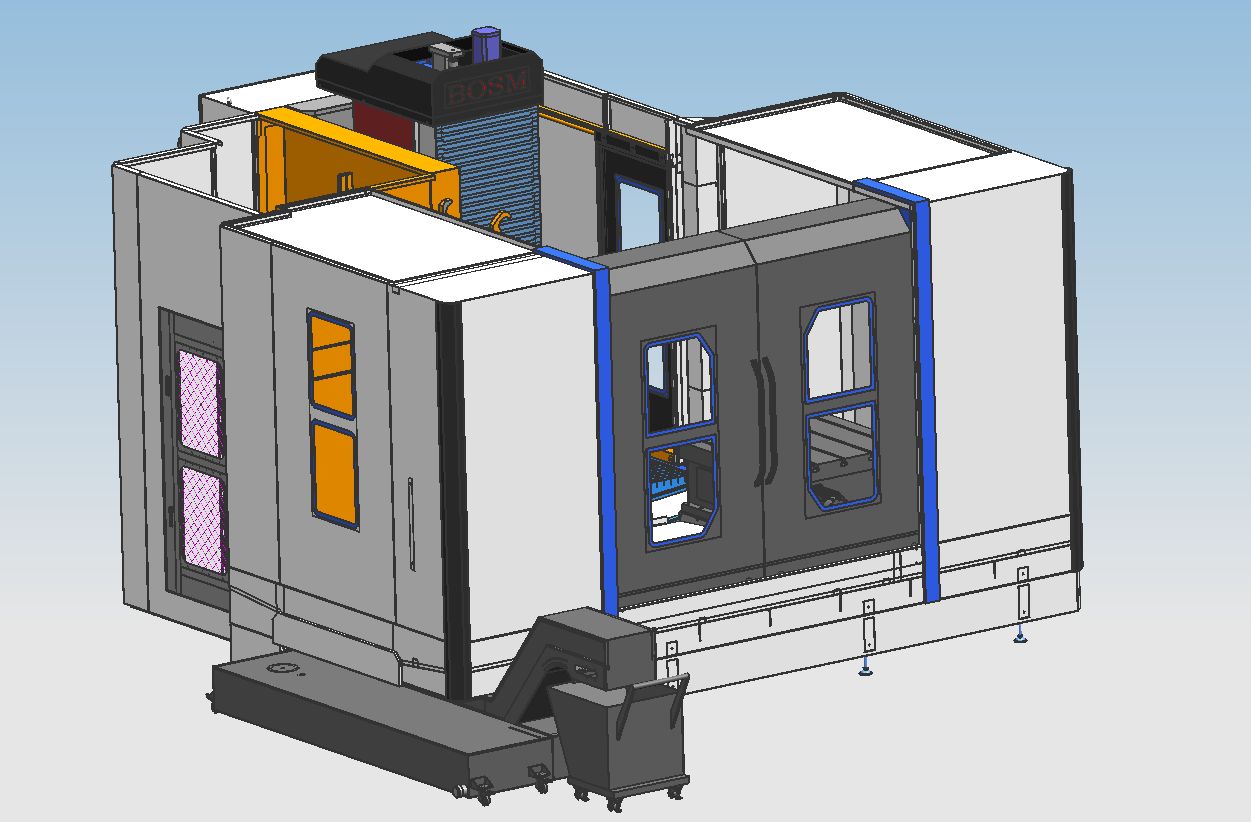
BOSM -4Z2000 High speed CNC EXERCITATIO et apparatus milling
1.Equipment usus:
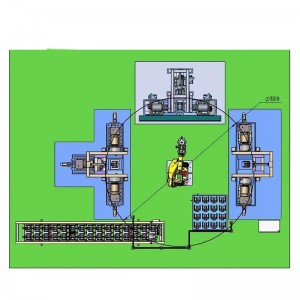
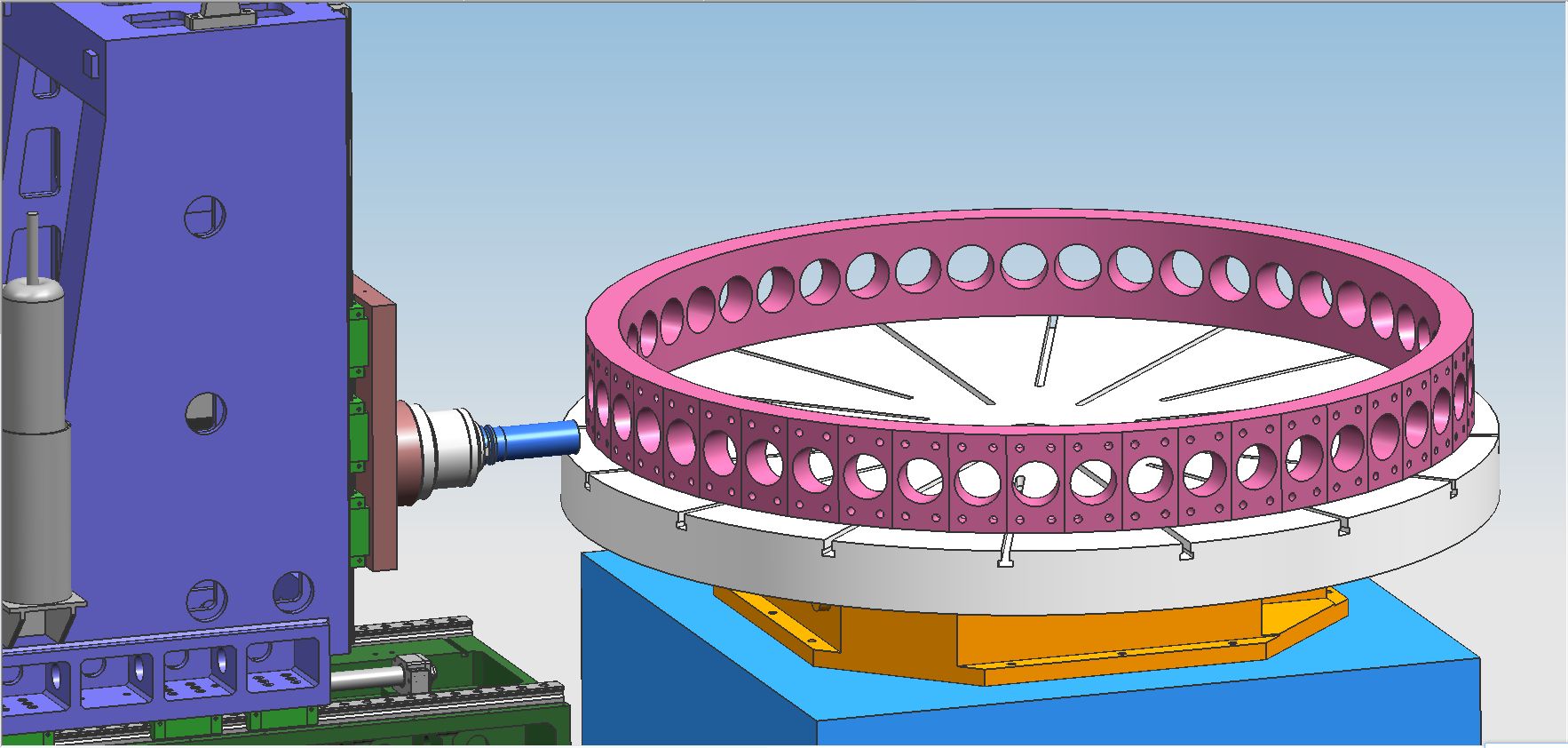
BOSM-1000 machina horizontalis CNC exercendis et molendinis maxime adhibita est ad multimodam efficientem exercendis, molendis, percutiendo et perforando valvularum, valvularum clausorum, reducentium, flangum, discorum, annulorum, occidentium subsidiorum et aliorum operum inter se efficax crassitudinis. . EXERCITATIO, milling, percussio et taediosum in singulis partibus materialibus et compositis materiis cognosci potest. Machina processus machinae digitally regitur, et operatio commodissima est. Excipere potest automationem, praecisionem, multi-ariam et massam productionis.
2. Equipment structure:
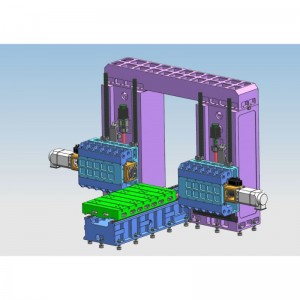
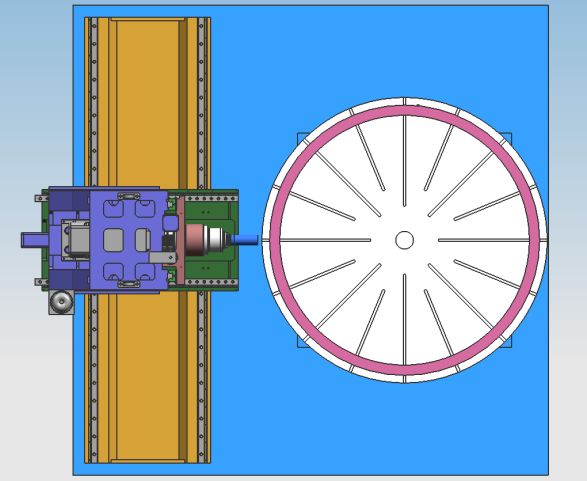
Hoc instrumentum maxime compositum est ex lecto, CNC indexing tabulam rotariam, columnam mobilem, sellam mobilem, potestatem capitis exercendi et milling, automatice lubricationis fabrica et fabrica tutelam, refrigerationem machinam circulandi, systematis digitalis imperium, systema hydraulica, systema electricum et cetera. Gubernator volvens linearibus duce sustentatur et ducitur, et cochleae praecisio impellitur. Machina altam accurationem positionis habet ac accurationem positionis repetere.
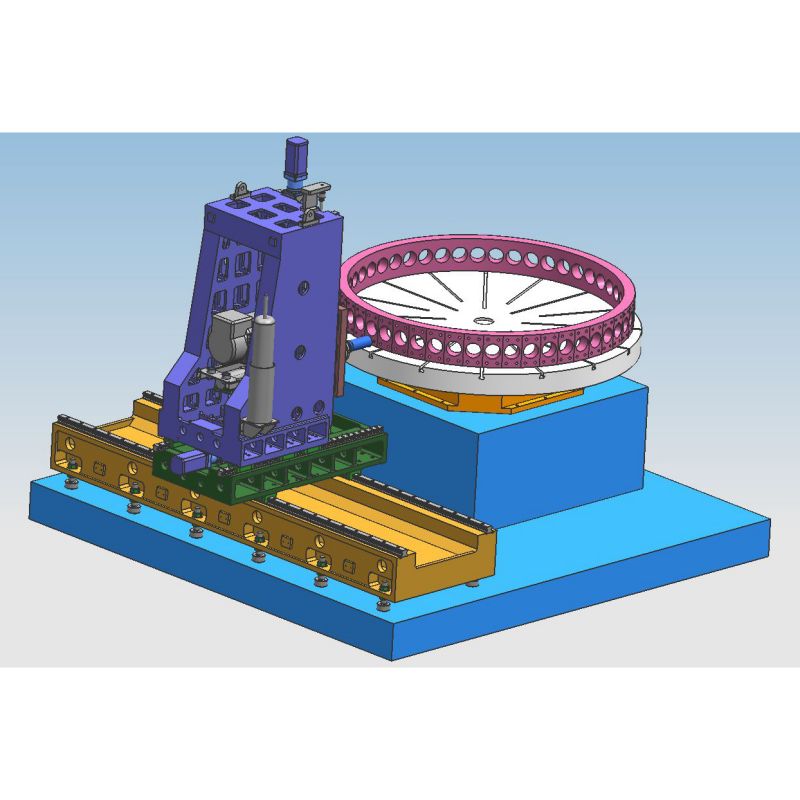
2.1. Lectus operabilis: Lectus factus est HT250 e partibus structuris ferreis conflatus. Finitur post temperaturam secundariam ad removendum accentus internam. Bonum habet rigorem dynamicam et staticem et nullam deformationem. Subtilitas numeralis imperium indexing laminam, servo coegi 360° arbitrariam indexing positionis et aeris/hydraulicum densis, ratio coegi utitur AC servo motore ad automatice index gyrationis scapus partem 360°, et index index accurationis unius myriadis gradus est. Indexing lamina in summo lecti posita est, et in fundo lecti fulmina aptabilia distributa sunt, quae facile aequalem lecti operabilem accommodant.
2.2. Columna mobilis: Columna ferri structurae mobilis iacta post secundariam curationem temperaturam ad removendum accentus internus finitur. Bonum habet rigorem dynamicam et staticem et nullam deformationem. Copia certae pilae cochleae par et servo motore constituunt lapsus agmen movendum in directum Y-axis. Copia certae pilae cochleae par et servo motore fac lapsus agmen move in X-axis directionem. Instrue artem unitatis in unitas slide. Motus columnae efficitur per rotationem pilae nucis in globulus cochleae a servo motore per iuncturam agitatae.
2.3. Sella mobilis: Sterilis mobilis instructa duobus ultra-altis portantibus capacitatem volvens ductor lineares paria railium, certa pila cochleae praecisionis par et servo motore, quae exercet potestatem capitis movendi in Z-axis directionem, quae potest Intellego Virtutem caput celeriter progredi, opera proferre, vicissim celeriter, cessa et actiones alias. Habet functiones chip latae fractionis, chip ablatio et mora.
2.4. EXERCITATIO potentiae caput: EXERCITATIO caput potentiae mechanicae fusum Taiwan adoptat, et peculiaris praecisio fusum contactum angularis adhibet afferentem, quod gradum immutabilem cognoscit instabilem per virtutem synchroni cinguli transmissionis. Cochleas a motoribus servo et pila agitati. Y-axis coniungi potest, imperium semi-clausum adoptat et functiones interpolationis lineares et circulares cognoscere potest. Fusum finis foraminis cerei BT50 est.
2.5. Lubricatio fabrica et tutela automatic fabrica:
Haec machina cum automatis lubricationis artificio instructa est, quae automatice paria mobilia lubricare potest ut cancellos ducere, cochleas plumbeas et tormenta. Machina
Z-axis et Y-axis pulvere probationis tegumentis instructi sunt, et colluvies IMPERVIUS elusiones circum operabilium instituuntur.
2.6. Plena digitalis ratio numerica potestate:
2.6.1. Cum chip fractionis functionis, chip fractionis tempus et cyclum fractionis chip potest apponi machinae instrumenti hominis.
2.6.2. Instrumento elevatio functionis instructus, instrumentum altitudinis elevatio super machinae instrumenti hominis apponi potest. Cum artem hanc altitudinem attingit, paulum terebra ad fastigium operis celeriter elevatur, tum astulae proiciuntur, et deinde ad superficiem exercendam celeriter transmittuntur et sponte ad operandum convertuntur.
2.6.3. Operatio centralised temperamentum archa et manu-tentum unitatis systematis numeralem adipiscuntur et instructi sunt cum USB interface et LCD liquidum cristallum velum propono. Ut facilius programmatio, repono, ostentatio et communicatio, operatio instrumenti habet functiones sicut homo dialogus apparatus, error compensatio et terror automatice.
2.6.4. Apparatus munus habet previewing et re- inspectione positio foraminis ante processus, et operatio est commodissima
* Ut commoditas levandi et pascendi anulos magnos, Machina tutelam externam non habet, et tutela externa ad libitum est.
3. Machinausus environment:
Potentia copia: AC380V±10%, 50Hz±1 temperatus ambiens: 0°~ 45°
4.Technical parametri
| Exemplar | BOSM-1000 | |
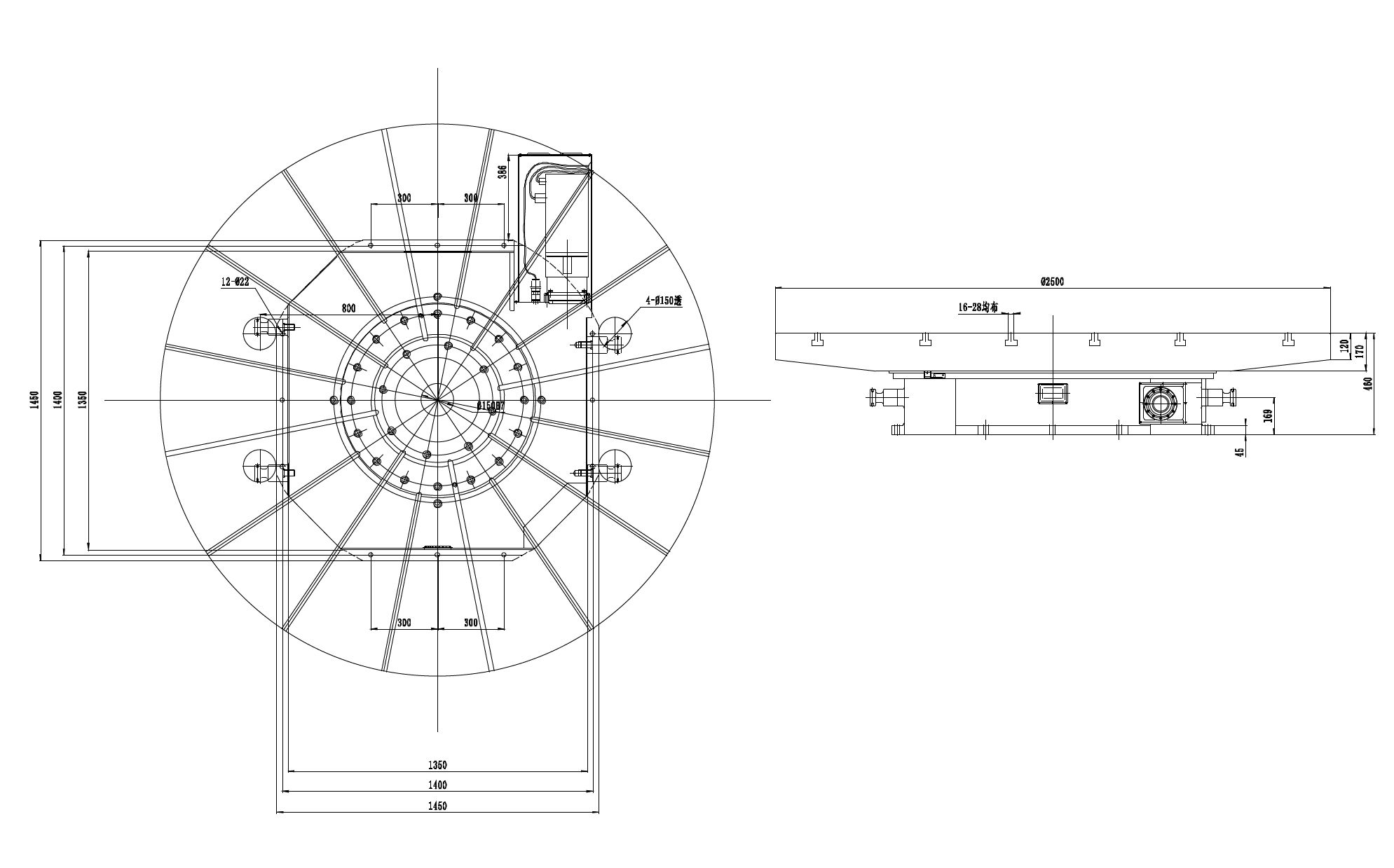
| Maximum processus workpiece magnitudine | Licuit maximam gyrationis diametri workpiece (mm) | ≤Φ2000 |
|
Worktable | Dimensiones operum (mm) quadrata | 1000 |
| Dimensiones operabilium (mm) circum | Φ1200 | |
| Horizontalis maximum onus (kg) | 5000 | |
|
Vertical Ram EXERCITATIO Unit | quantum) | 1 |
| Fusum cereum | BT50 | |
| Diam diam EXERCITATIO (mm) | 2-120 | |
| Milling cutter discus diameter (mm) | 200 | |
| Ictibus diametri (mm) | M6-M36 | |
| Procul a facie ad mensam centrum fusum finem (mm) | 1000-1600 | |
| Distantiae a centro ad colum ad planum superius mensae (mm) | 100-1100 | |
| Fusum celeritatem (r / min) | 30-3000 | |
| Fusum motricium virtutis (kw) | 30 | |
| Workpiece rotationis axis (axis) | Maxima divisio numerus (mm) | 360° |
| Set minimam divisionem unitatis | 0.001° | |
| A-axis servo motor potentia (kw) | 4.2 | |
| Caput movet sinistra et dextra potestas (axis X) | Maxima plaga (mm) | 2000 |
| X-axis celeritate movens (m / min) | 0~8 | |
| X-axis servo motricium virtutis (kw) | 2.4 | |
| Potestas capitis sursum et deorsum (Y axis) | Maxima plaga (mm) | 1000 |
| Y-axis celeritate movens (m / min) | 0~8 | |
| Axis servo motor potentia (kw) | 2.4 Brake | |
| Columna motus longitudinalis (Z axis) | Maxima plaga (mm) | 600 |
| Z-axis celeritas movens (m / min) | 0~4 | |
| Z axis servo motor virtutis (kw) | 2.4 | |
| Positioning accuracy | 1000mm | ±0.05 |
| Repeatability | 1000mm | ±0.025 |
| CNC indexing table indexing accuracy (mm) |
| 15" |
| Apparatus dimensiones (Including praesidium) | Longitudo (X) Latitudo (Z) Altitudo (Y) (mm) | 5300*6000*3400 |
| Crassa pondus (e) inter tutelam | about)20 | |