






BOSM -Horizontal Counter EXERCITATIO et boring Machina
Usus 1. Equipment:
BOSM machina horizontalis contra artem et taediosam machina specialis est machina pro societate tua ad galeros grues turris processus. Machina instructa cum 2 instrumentis horizontalibus exercendis et taediosis potentiis capitibus, quae exercendis, molendis et taediosis officinis effectivis intra ictum range comprehendere possunt. Secans et aliis processui, instrumentum velocitatis positionis celere est, processus accurationis altus est, et processus efficientiae altus est.
2. Apparatus structurae notae:
2. Main components de 1.Machina
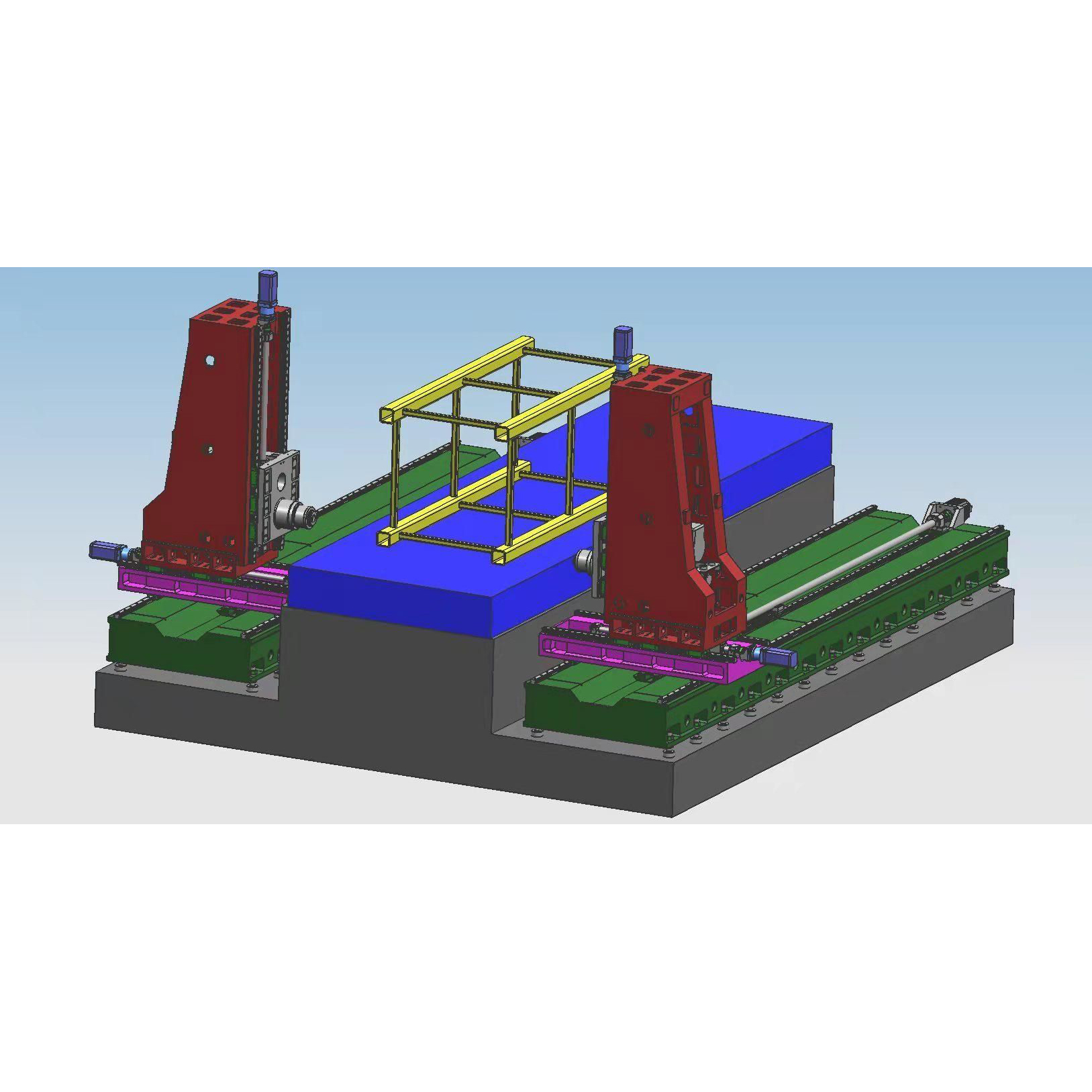
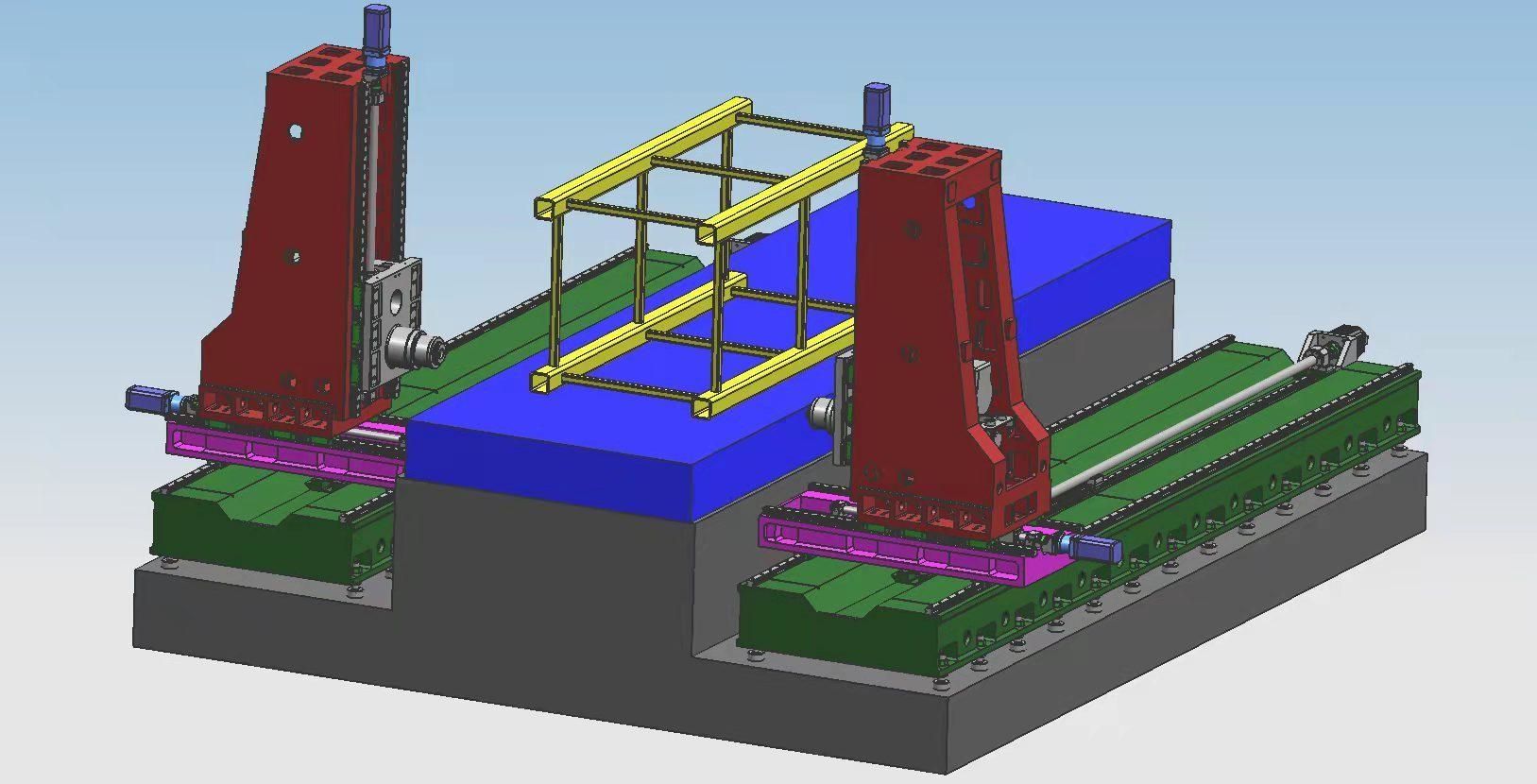
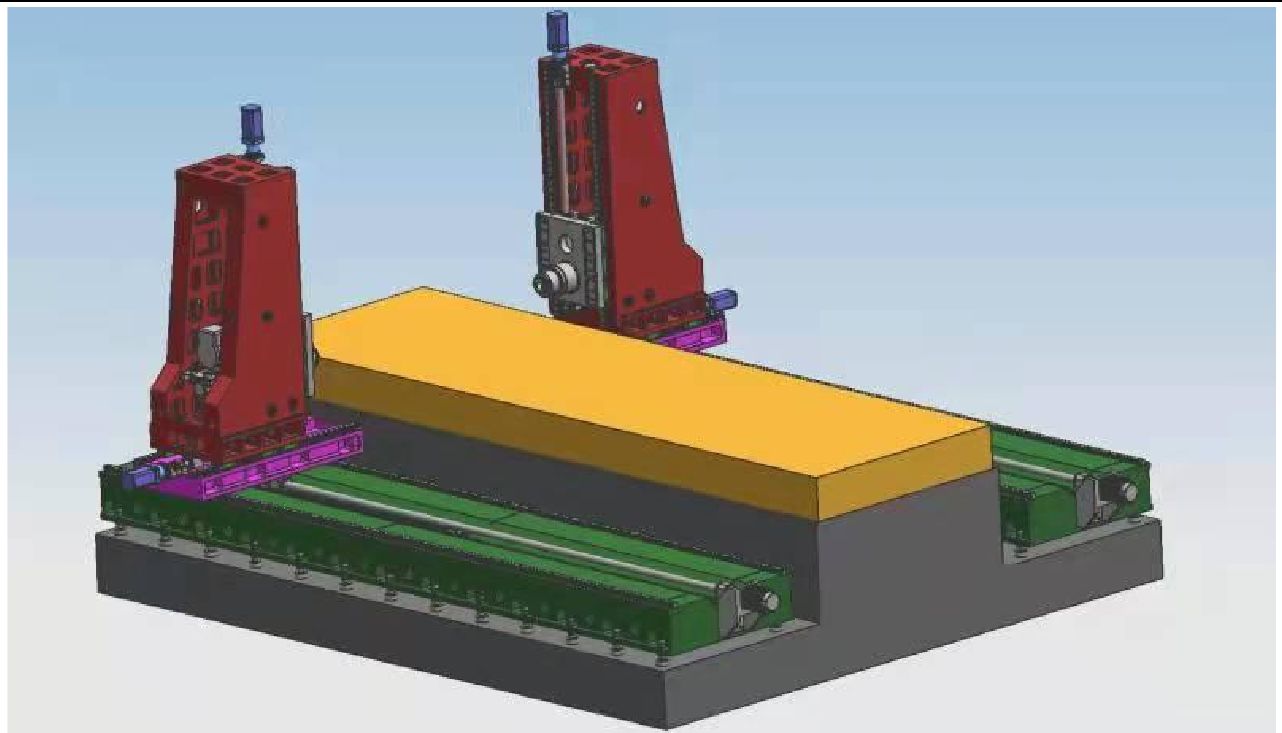
Praecipuae partes Machinae: lectus, operabilis, columna dextra et dextra, sellae, arietes, etc., magnae partes fiunt coronae resinae arenae, altae species ferreae cinerei 250 fusurae, annatae in fovea arenae calidae → tremor canus → calidus fornax furnum → vibratio senescit → Aspera machining → vibratio senescit → fornax furnum → tremula senescit → consummatio ad omnino tollendam negativam partium vim et observantiam partium stabilium custodit . Operimentum instrumenti fixum est, et vis utrimque capita in fronte et postico basi movere potest; Machina munera habet ut artem, taediosum, countersingendi, Ictibus, etc. Methodus refrigerandi instrumenti est interna refrigeratio plus externa refrigerationis. Machina 5 secures pascentium continet, 2 capita potentiae secans, quae simul cum 5 securibus congruere possunt vel una agere possunt. Directio axialis Machinae et caput potentiae in figura infra monstrantur.
2. 2 Praecipua structura partium transmissionis axialis pascendi
2.2.1 X axis: Caput potentia lateraliter reciprocum per regulam basin rail.
Axis coegi ad X1-axis: AC servo motore plus praecisionem altae planetariae reducens potestatem capitis per cochleam globum repellere adhibetur ad motum linearem X-axis cognoscendum.
X2-axis transmissio: AC servo motore plus praecisio altae planetariae reducens vim capitis per cochleam transmissionem agitare ad X-axem motum linearem cognoscendum.
Rector rail formae: Duae altae vi praecisione ductore lineari cancelli in basi dilatato teguntur.
2.2 Y1 axis: Potestas capitis sursum et deorsum in columna reciproco.
Axis coegi Y1-: Accipe AC servo motorem ad ejiciendum per cochlea pilam ad cognoscendum motum linearem axis Y1-. Rector rail formae: 4 frusta 45 typo lineari ductori cancelli.
2.2.3 Y2 axis: Virtus caput reciprocum sursum et deorsum in columna.
Y2-axis transmissio: AC servo motori adhibetur per cochleam pilam pellere ad motum linearem Y1-axis cognoscendum.
Rector rail formae: 4 frusta 45 typo lineari ductori cancelli.
2.2.4 Z1 axis: Virtus capitis in sella ultro citroque reciproco.
Z1-axis transmissio: AC servo motoris et praecisio- nem planetarii redactoris motus per cochleam pilam pellere solent ad motum linearem Z1-axis cognoscendum.
2.2.5 Z2 axis: Virtus in sella caput ultro citroque reciproco.
Z2-axis transmissio: AC servo motoris et praecisio- nem planetarii redactoris motus per cochleam pilam pellere solent ad motum linearem Z2-axis cognoscendum.
2.3. Chip remotionem et refrigerationem
Sunt vectores emissarii planae catenae utrinque sub opificinae inaugurati, et astulae ferreae in TRADUCTOR fodiuntur in fine ad productionem humanam cognoscendam. Est sentinam refrigerandi in piscina refrigerantis TRADUCTORS chippis, quae adhiberi potest ad refrigerationem internam + refrigerationem externam instrumenti ad vitam instrumenti perficiendam et serviendam curandam, et redivivus refrigerans potest.
3. Plena digitalis ratio numerica potestate:
3.1. Cum chip fractionis functionis, chip fractionis tempus et cyclum fractionis chip potest apponi machinae instrumenti hominis.
3.2. Instrumento functionis elevatio, instrumentum distantiae elevatio super machinae instrumenti hominis imponi potest. Cum ad spatium pervenit, instrumentum celeriter tolletur, et tum astulae abicientur, et deinde ad superficiem exercendam ieiunent ac statim ad opus convertentur.
3.2. Operatio centralised archa control et ansam unitum systematis numeri capiunt et instructi sunt cum USB interface et LCD liquida cristallina ostensio. Ut facilius programmatio, repono, ostentatio et communicatio, operatio instrumenti habet functiones sicut homo dialogus apparatus, error compensatio et terror automatice.
3.2.. Apparatus munus habet praemonstrandi et rursus inspiciendi foraminis positio ante processus, et operatio commodissima est.
4. Automatic lubricatio
Apparatus praecisio linearis dux paria rail, subtilitas pilae cochleae paria et alia motus summus praecisio paria systemata latis lubricationis instructa sunt. Automatice lubricatae sentinae outputs olei pressionis et quantitatis lubricatoris oleum cubiculi oleum intrat. Cum cubiculi oleum repletur oleo et pressionis systematis ad 1.4~1.75Mpa oritur, pressionis switch in systematis clauditur, sentinam cessat et valvae exonerationis simul exonerantur. Cum pressio olei in via guttae infra 0.2Mpa, quantitatis rubricator incipit punctum lubricationis implere et unum oleum implens complet. Ob quantitatem olei praecise quam quantitatis olei et facultatem ad pressionem systematis deprehendendi, copia olei certa est et efficit ut in superficie uniuscuiusque par kinematici cinematographicum sit oleum, quod frictio et indumentum minuit et damnum prohibet. internum per overheating structuram. ut Apparatus accurationem et vitam.
5. Machinausus environment:
Potentia copia: AC380V±10%, 50Hz±1 temperatus ambiens: -10°~ 45°
6. Criteria acceptationis:
JB/T10051-1999 "General Technical Specifications for Hydraulic System of Metal Secans Machines"
7. Technical parametri:
| Exemplar | 2050-5Z | |
| Maximus processus workpiece magnitudine | Longitudo latitudo altitudo (mm) | 5000×2000×1500 |
| opus desk magnitudine | Longitudo X Latitudo (mm) | 5000*2000 |
| Virtus caput basis directionis itinerantur | Recedite commeo (mm) | 5000 |
| Virtus caput sursum et deorsum | Ictus arietis sursum deorsum (mm) | 1500 |
|
Horizontalis arietis genus EXERCITATIO caput potentiae caput 1 2 | Quantitas (2 quam at pede) | 2 |
| Fusum cereum | BT50 | |
| Diam diam EXERCITATIO (mm) | Φ2-Φ60 | |
| Ictibus diametri (mm) | M3-M30 | |
| Fusum celeritatem (r / min) | 30~3000 | |
| Servo fusum virtutis motoris (kw) | 22*2 | |
| Dextra peregrinatione (mm) | 600 | |
| Bidirectional Positioning Sagaciter | 300mm*300mm | ±0.025 |
| Per-directional repeat positioning accuracy | 300mm*300mm | ±0.02 |





